
🔧 Gamepad Setup#
Purpose#
Set up a Logitech Gamepad on the Master to work with ROS2 Humble on Ubuntu. This will allow you to use a Logitech Gamepad for controlling robots. Follow these steps to install dependencies, configure the gamepads, and test them in your ROS2 workspace.

Steps#
1. Install the joy Package#
(Note: This package is already installed on the Master computer.)
The joy package in ROS2 is required to read inputs from gamepads. If needed, install it with the following commands:
sudo apt update
sudo apt install ros-humble-joy
2. Install the teleop_twist_joy Package#
(Note: This package is also pre-installed on the Master computer.)
If you plan to control a robot with the gamepad, install the teleop_twist_joy package:
sudo apt install ros-humble-teleop-twist-joy
3. Plug in Your Gamepads#
Connect your Logitech Gamepad to your computer via USB.
4. Verify Gamepad Detection#
To ensure the gamepads are detected:
Open a terminal and run:
ls /dev/input/js*
You should see output like
js0,js1, etc., corresponding to your connected gamepads.
5. Install and Use the Joystick GUI Calibration Tool#
Install the joystick calibration tool:
(Note: This package is already installed on the Master computer.)sudo apt-get install jstest-gtk
If it throws the following error
Gtk-Message: 10:19:54.335: Failed to load module "canberra-gtk-module"
run
sudo apt install libcanberra-gtk-module libcanberra-gtk3-module
Launch the calibration tool:
jstest-gtkThe following window should appear:
Configure and inspect the joystick
Double-click your gamepad to open its settings.
Move the joysticks and press buttons to observe which axes and buttons correspond to the output values.
If the joystick values do not return to zero in the neutral position, click the Calibration button and follow the on-screen instrution to calibrate the gamepad.
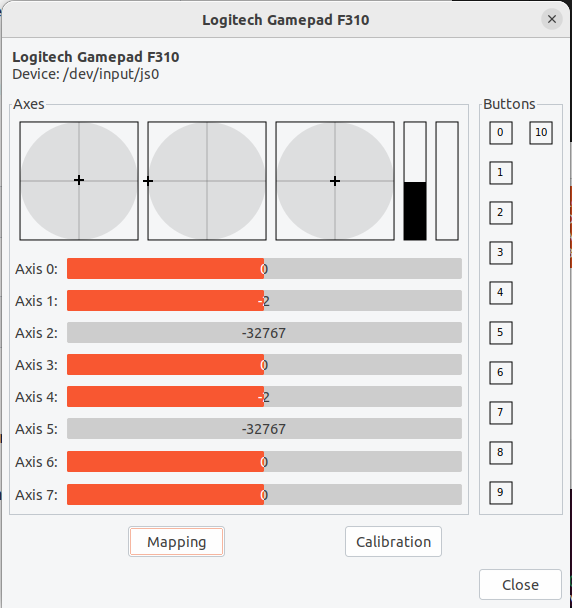
The left stick should be mapped to
Axis 0andAxis 1, and the right stick should be mapped toAxis 3andAxis 4. If this is not the case, press themodebutton on the game.
6. Launch the joy Node#
The joy node reads input from your gamepads and publishes joystick data to ROS topics. To start the node, run:
ros2 run joy joy_node
7. Test Joystick Output#
Check that the gamepad is working by echoing the
/joytopic:ros2 topic echo /joy
Move the joysticks or press buttons on your gamepad. You should see data being published in the terminal.