
🚀 Final Project#
Attention
Read this page thoroughly before you start working on this final project.
📌 Objectives#
Students will integrate concepts from earlier modules to design and implement a complete robotic system capable of handling complex tasks using ROS2.
Students will demonstrate proficiency in robotic systems by building task-specific machines with onboard computing.
Students will apply knowledge from across the course to develop, test, and deliver a functional final project.
📜 Overview#
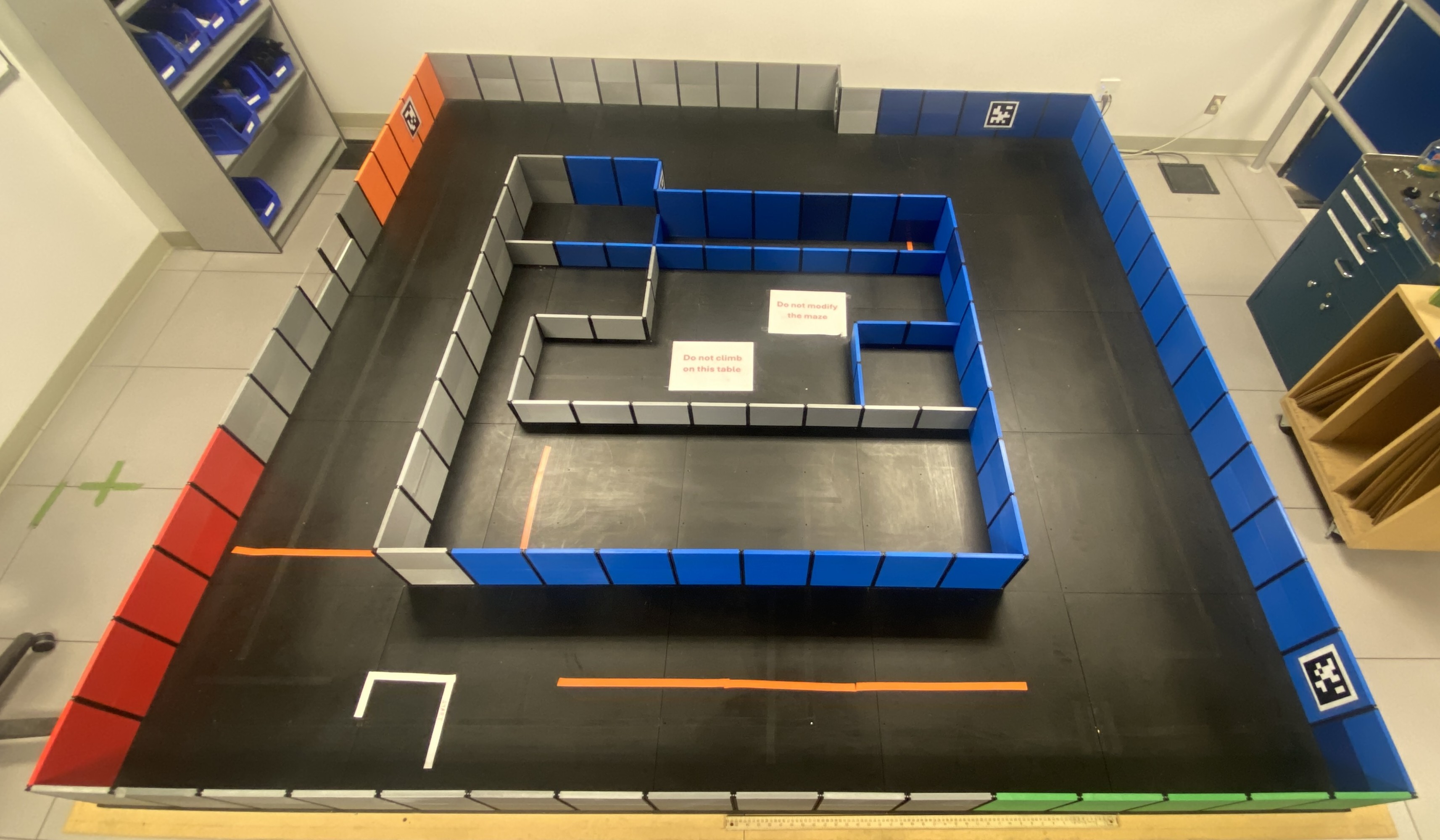
In this final project, you’ll combine everything you’ve learned throughout the course to design and implement a complete robotic system using ROS2. The project challenges you to create a robot that solves real-world tasks, requiring multiple components to work together seamlessly.
Your robot will navigate a maze in the lab, employing technologies from previous modules:
LIDAR: Keeps the robot centered between walls.
IMU: Handles precise turns (90°, -90°, 270°).
OpenCV: Detects and reacts to stop signs.
AprilTags: Guides the robot through the maze using tag IDs and distances to decide actions like turning or stopping at specific locations.
Important
If you notice any discrepancies in the project description or grading criteria, the correct information will follow this order of priority: (1) Instructor messages via Teams, (2) this Course Web, (3) Gradescope, and (4) the project overview slides. The Course Web will always be updated immediately to reflect any changes, and outdated instructions will be clearly crossed out.
🏴☠️ Story#
Ahoy, crew! The legendary 💀 pirate captain, Stan Baek, has uncovered an ancient scroll that reveals the location of a hidden treasure island. But there’s a catch—the treasure is locked deep inside a deadly maze!
According to the scroll, the maze is marked with enigmatic symbols known as AprilTags. These cryptic signs hold the key to locating the treasure. Miss one, or read it wrong, and… well, let’s just say you won’t be making it back.
Rather than braving the perilous maze, the infamous pirate captain, Dr. Baek, is relying on you to develop cutting-edge technology to solve the mystery. Your task is to design and build a robotic system that can navigate the maze independently, decode the AprilTags, and uncover the treasure’s hidden location.
Here’s what the scroll reveals about navigating the maze:
Follow the walls in the maze at all times.
Avoid stopping at or looking out windows - those are deadly!
React to AprilTags: These tags act like arrows you must follow. Detect the AprilTag and follow the direction indicated.
If the tag’s yaw is \(90^\circ\), make a \(90^\circ\) left turn (counterclockwise). Note that the yaw angle is measured relative to the camera frame, not the AprilTag itself.
Tag ID 0 & 1: Follow the direction shown on the tag.
Tag ID 2: Follow the direction, but the scroll warns that the treasure chest is nearby. Look around to locate the treasure chest, which is buried under AprilTag ID 4. Record the pose (position and orientation) of the treasure chest; you will need to report this once the robot returns home.
Tag ID 3: The scroll says this is a trap. Stop for at least 5 seconds, then make the turn shown on the tag — but in the opposite direction. For example, if the tag indicates a \(90^\circ\) turn, you must instead make a \(-270^\circ\) clockwise turn.
Stop Sign: You have reached the exit of the maze. Stop within 0.6 meters of the sign. Report (print to the terminal) the location and orientation of the treasure chest.
Once you locate the treasure chest, send Captain Baek the maze map along with the chest’s pose in the map so he can claim the loot!
🎮 Final Project Gamesmanship#
1. Demo & Coding (40 points)#
Review the presentation and final report requirements before you begin coding.
Start early—delays can put your completion at risk.
Use the code from Labs 10 and 11 as a reference, but do not implement your project within those lab files. Instructors will evaluate the code inside your
final_projectfolder. You must name it final_project.Take advantage of debugging tools like
rqt,ros2 topic, andrvizto fine-tune high-level behaviors.Prioritize your final report:
Your analysis in the report is more important than completing the maze.
Manage your time carefully—don’t sacrifice report quality for extra demo points. Losing 10 points on the report to earn 5 points in the demo isn’t worth it!
2. Presentation (20 points)#
Make visuals a priority! Figures, tables, and graphs often communicate concepts better than lengthy explanations.
Cover all required details in your presentation.
Stick to the 5-minute limit—practice to refine your delivery. At the 6-minute mark, your talk will be stopped, and any content beyond that won’t be graded. Time management is key, just as it is in professional conferences.
Practice, practice, practice. Short presentations that lack detail often result in lost points. Even experienced engineers practice for their conference presentations.
Carefully review the rubric posted on Teams before you begin.
3. Final Report (40 points)#
Strengthen your analysis with figures and tables to clearly present your findings.
If you opt for an in-person demo, also submit a video demo that aligns with your report’s plots to support your documentation.
🛠️ Requirements#
Timeline#
L35 0700: Design Presentation Slides (Gradescope & Instructors)
Submit your PowerPoint (.pptx) file to your instructor by L35 0700.
Your slides will be displayed on your instructor’s PC for seamless transitions between speakers.
Make sure to submit a pptx file, not Keynote or Google Slides, unless your instructor has specifically approved it.
Additionally, upload a PDF version of your slides on Gradescope by the same deadline.
No grace days are available for presentation slides—late submissions won’t be accepted.
L35: Design Presentations: Prepare to present your project design during L35.
L37 0700M-day: T37 2359, T-day: M38 2359: Early BirdNavigate through Tag ID 2 and
locate the treasure chestdetect AprilTag ID 2.You will earn 5 bonus points that can carry over the final course grade. It is 1.25% of the total course grade.
You may not use grace days for early bird; it is just contradictory.
L39 0700M-day: T39 1700, T-day: M40 0700: Live Demo DueYou may not use grace days. The live demo must be completed by the deadline. Otherwise, you will not have enough time to write the final report.
T40 2359: Final Report, Demo Video, Code & Peer Evaluation
Submit a video demo of the robot navigating the maze along with the corresponding screen recording.
No grace days are available—everything must be submitted by midnight (T40 2359).
Submit the peer evaluation on Gradescope.
T40 2359: Return your robots
Every cadet must return their robot, including a power cable, battery holder (return the batteries to the battery station), one SD card inserted in the Raspberry Pi.
You must report any broken parts or malfunctions.
Coding Requirements#
Add detailed comments to your code for clarity.
Avoid delays, loops, waits, or sleeps, as they interfere with the timer functionality.
If you have any code on the robot, you do not need to create a GitHub repository. You may zip the files and submit them on Gradescope.
Penalties#
Up to 5 points will be deducted for delays or loops in the controller code.
Poor coding practices, such as inadequate comments or hard-coded values, may result in up to 5 points being deducted.
🎬 Demonstrations#
Below is the final grading rubric, with a total of 42 points assigned to the demonstration. The score will be capped at 40 points, so even if you lose 2 points, you will still earn a 100% on your demo.
Gamepad Control (2 points):
Place your robot behind the brown line.
Use the gamepad to move your robot to the starting position (white box), then relinquish control so it can begin navigating the maze.
Use the brown marker inside the white box as the origin of the maze frame.
You should be able to take control at any time during maze navigation .
Wall Following (10 points):
The robot must follow the maze walls without colliding.
Each wall collision results in a 1-point deduction.
However, if the robot successfully reaches the final goal (yellow line), no more than 3 points will be deducted.
Stop Sign (5 points):
The robot must stop at the yellow line, with its bottom plate covering any part of it.
After coming to a complete stop, the robot must print its current pose and the treasure chest’s pose, then remain stopped indefinitely.
AprilTags (20 points):
The robot must stop at the orange line before turning.
Once the robot stops, you must print the tags’ poses relative to the origin (the brown marker) on the screen.
Its bottom plate must cover at least part of the orange line before executing a turn.
Precise turns aren’t directly graded, but improving turn accuracy will boost overall performance.
Map Generation (5 points):
As the robot explores the maze, it must generate a map.
This map should be included in your final report.
Spring 2025 Final Project Demo
👩🏫 Design Presentation (20 Points)#
Your presentation will last 5 minutes, followed by a 2-minute Q&A session. Be sure to cover the following topics:
Note
Use visual aids like diagrams, flowcharts, and maze images to enhance clarity. Avoid filling slides with excessive text; instead, keep your audience engaged and focused on listening to you.
Purpose [3 Points]
Briefly explain the problem your robot is solving.
Discuss the project requirements.
Design [10 Points]
This is the most heavily weighted section (50% of the presentation grade).
Detail your design approach, including:
Using timers to avoid loops and delays.
Tracking turning angles for accurate maneuvering.
Determining the robot’s coordinates at the treasure chest.
Including a clearly legible finite state machine diagram.
Debugging & Testing [4 Points]
Explain how your testing methods improve debugging efficiency.
Describe strategies for handling unexpected robot behavior, such as:
Misreading AprilTags or the stop sign.
Identifying and resolving navigation errors.
Do not include basic syntax or build error discussions—focus on high-level troubleshooting techniques.
Questions [3 Points]
Prepare to defend your design choices.
Be ready to discuss possible enhancements to your project.
Q&A extends beyond the 5-minute presentation, adding another 2 minutes for discussion.
Timing & Practice
Points will be deducted for exceeding the 5-minute limit.
Presentations will be stopped at the 6-minute mark—content beyond that won’t be graded.
Practice your delivery to balance detail and conciseness—timing matters!
Submission
By L35 0700, submit your PowerPoint (.pptx) file to your instructor.
Additionally, export your slides as a PDF and submit them on Gradescope.
No grace days are allowed for presentation slides. Late submissions incur a 3-point penalty.
Attention
On Gradescope, select questions/pages to indicate where your responses are located—failure to do so will result in point deductions.
📈 Final Report (40 Points)#
Refer to ECE387_Project Report Template.docx (available on Teams under Files > Class Materials) for detailed guidelines.
Note
Even if your demo is not successful, whether you use grace days or not, ensure you discuss everything based on the progress you have made.
Introduction/Purpose [5 Points]
Clearly define the problem and project requirements.
Design [10 Points]: Discuss key design elements, including:
Image resolution, frame rate, and sensor choices.
Controller design, including finite state machine details.
Include an RQT graph with legible plots.
Analysis & Results [20 Points]
This is the most crucial section—your engineering analysis matters!
Base findings on collected data rather than visual observations.
Evaluate performance of vision sensors, LiDAR, and IMU.
Provide measurements, plots, and time-based evaluations for each task.
Discuss any unresolved challenges and propose solutions.
Highlight unique features that set your robot apart.
Clearly explain incomplete tasks and why they weren’t achieved.
Conclusion [5 Points]
Summarize your findings and project outcomes concisely.
Attention
On Gradescope, select questions/pages to indicate where responses are located—failure to do so will result in deductions.
🚚 Deliverables#
Deliverable 1: [20 Points] Design Presentation#
[3 Points] Purpose
[10 Points] Design
[4 Points] Debugging & Testing
[3 Points] Questions
Deliverable 2: [40 points] Demo & Code#
Demo Breakdown#
[10 Points] Wall following
[8 Points] Stop sign behavior
[15 Points] AprilTags navigation
[5 Points] Map generation
[2 Points] Gamepad control
Code Submission:#
Push the code from the master computer to GitHub.
If there is additional code on the robot, compress it using tar and gzip (
.tar.gzformat) and send it to your instructor. Make sure to research how to properly create the compressed archive.
Deductions#
[-5 Points]: Delays or loops in ISR.
[-5 Points]: Poor coding practices (e.g., lack of comments, excessive hard-coded values).
Deliverable 3: [40 Points + Bonus] Final Report#
[5 Points] Introduction
[10 Points] Design
[20 Points] Analysis & Results
[5 Points] Conclusion
[Bonus Points] Extra credit for the best report in class!